

 联系我们
联系我们

其次机器人收到字符以后就需要建立一个类似于deltaX,deltaY,和thetaZ的num的变量,用以存储过程数据。

先假设x的位是1,给Startbit1赋值为1插入函数strfind,查找个“,”在第几位,得到EndBit1值


通过StrPart函数,提取从StartBit1开始到LenBit1结束的字符串,即x的值的字符串
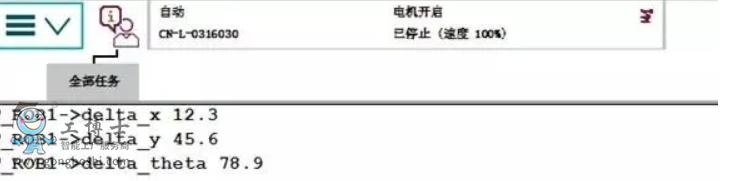
同理得到y和z的字符串。通过StrToVal函数,把s1转为num型,付给delta_x, StrToVal函数的反馈值为bool量,即转换成功为true不成功为false。同理得到delta_y和delta_theta
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
更多机器人请咨询:abb示教器等一站式服务平台