

 联系我们
联系我们

ABB机器人急停停止距离理论计算方法
1. 机器人急停属于Cat0停止,即断电,电机合抱闸的方式让机器人停车。
2. 从拍下到实际机器人停止,机器人会运动一段距离。该距离与机器人速度,姿态,负载等多参数有关。
3. 如何计算该理论停止距离?注:理论值仅供参考,还以实际测量为准。
4. 此处介绍两种方法:
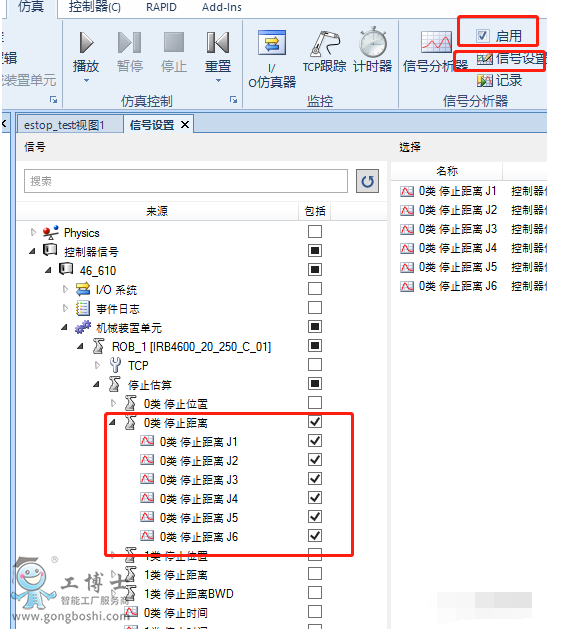
5. 点击“仿真”下的信号设置,勾选如下选项,下图会显示当前机器人速度和姿态下各轴的理论停止距离(单位:°)。此处举例显示1轴。可以多选
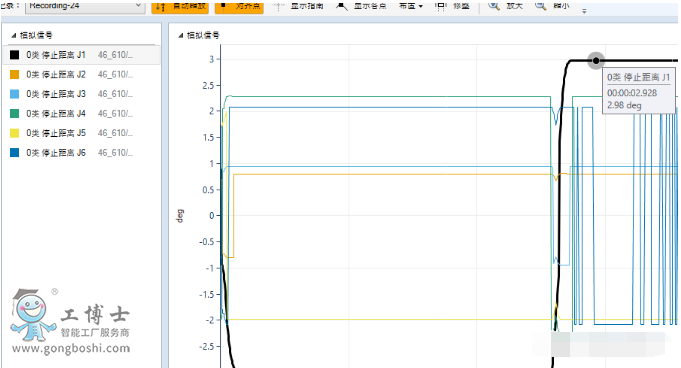
8. 从上图可以获取“急停”时的理论各轴停车距离。
9. 可以通过如下代码获取实际停止位置,再减去理论减速距离(各轴)获取理论“急停”信号触发时的位置,转化到robtarget后计算距离
PROC cal2()
jtmp:=CJointT();
!获取***终停车位置,类型jointtarget
pos1:=CPos(\Tool:=MyTool);
!获取***终停车位置,类型pos
jtmp.robax.rax_1:=jtmp.robax.rax_1-2.98;
!此处举例只有1轴移动,停车位置减去理论停车角度
ptmp:=CalcRobT(jtmp,MyTool);
!将理论“急停”触发位置转化为robtarget
reg1:=Distance(pos1,ptmp.trans);
!计算距离
TPWrite "estop distance cal"\Num:=reg1;
ENDPROC
10. 运行代码后,获取结果如下
注:本文章文字、图片部分来自网络
