

 联系我们
联系我们

-
ABB机器人RAPID指令中,通过转弯半径zonedata来定义机器人是否***到达某个点或者提早拐弯。
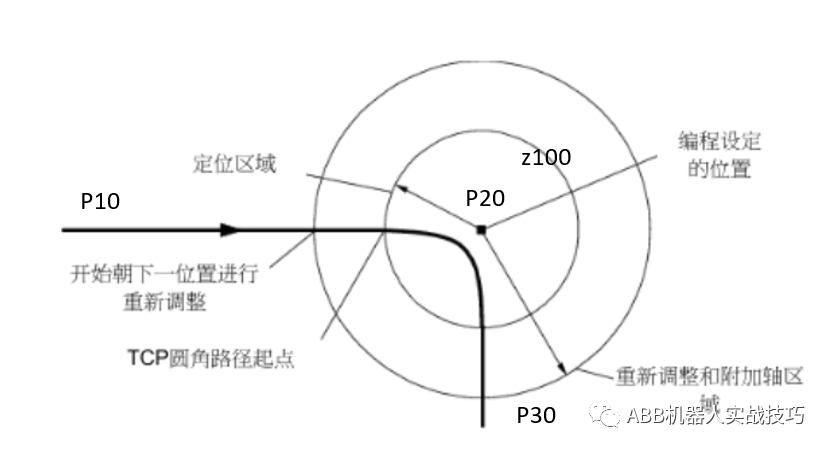
2. 例如以下语句表示机器人到达目标点P20的100mm的范围内,开始向下一个位置拐弯
MoveL P10,v200,z100,tWeldGunWObj:=wobj0;
MoveL P20,v200,z100,tWeldGunWObj:=wobj0;
MoveL P30,v200,z100,tWeldGunWObj:=wobj0;
3. 在Robotstudio中,可以可视化的展示各区域数据,方便前期判断轨迹,例如下图为z100效果

4.在创建完轨迹后,右击对应轨迹,“查看”-“显示各区域”,则可以看到当前轨迹的zonedata效果。
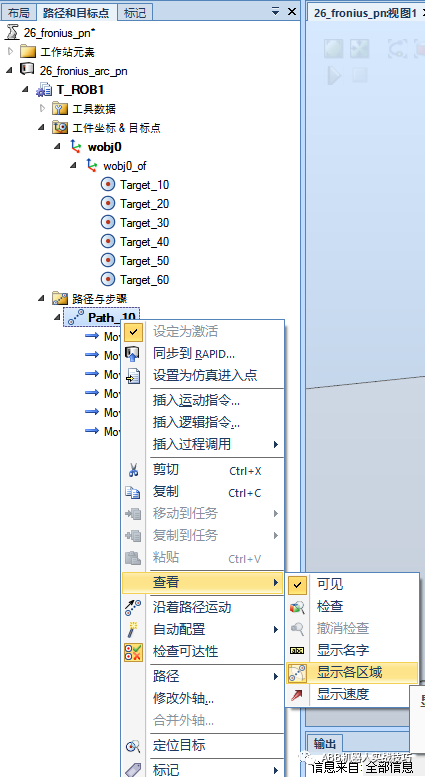
5. 也可以批量修改zonedata数据,选择需要调整的轨迹,右击,“修改指令”-“区域”,选择区域


上图显示z10转弯半径效果
以上内容转载于网络
更多:ABB配件
